Robotics and Mechatronics Laboratory
Kanazawa University
金箔の自動裁断装置
クレーン用の衝突モニタリングシステム
再帰性反射マーカーによる移動ロボットのナビゲーション
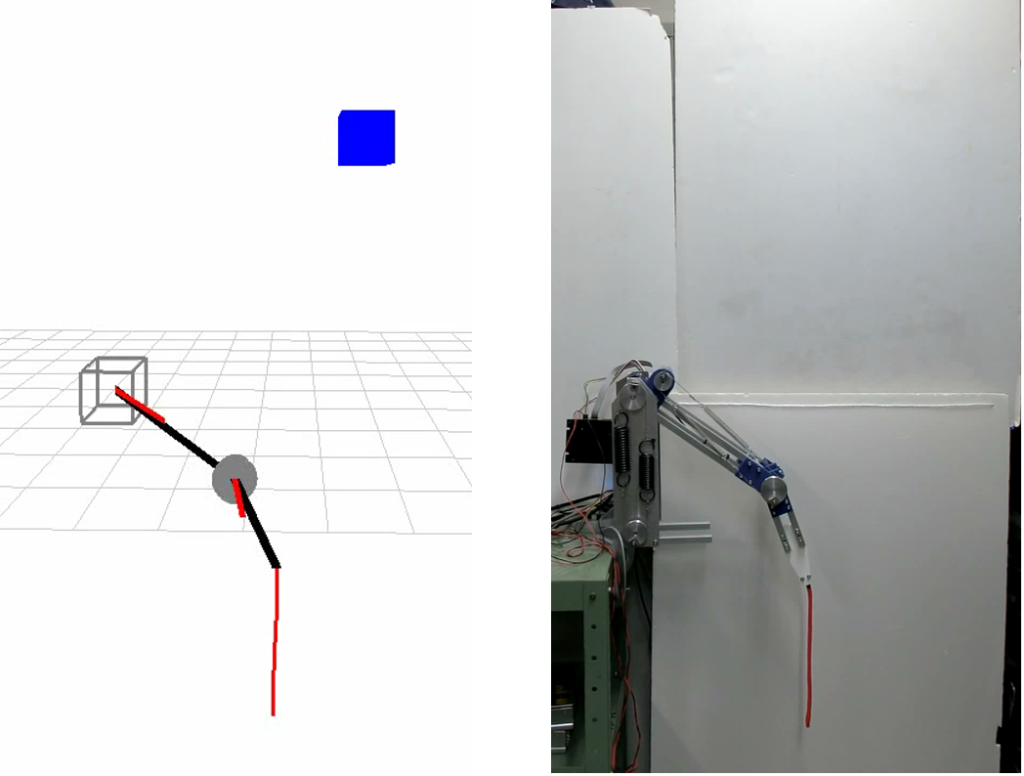
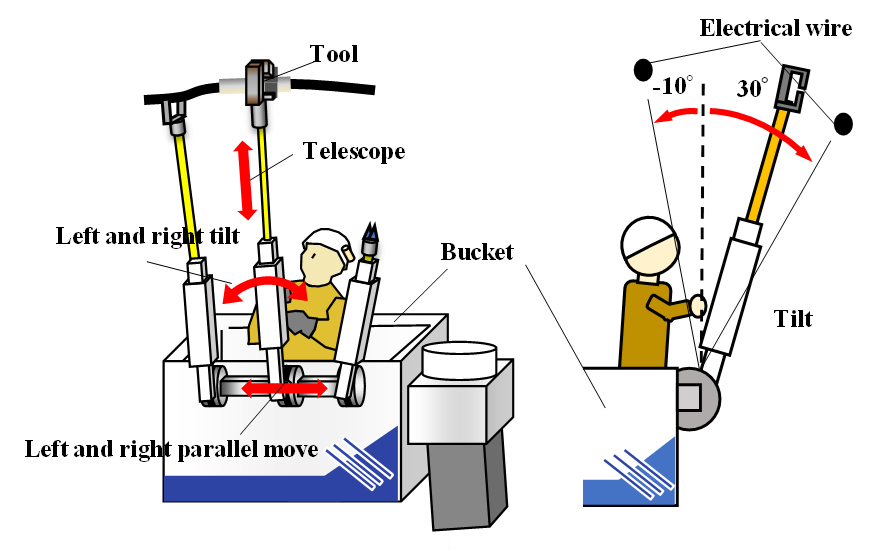
配電作業用アシストアーム
ロボットによるタオルの展開作業
道具を使ったロボットによる衣類の折り畳み作業
磁気を利用した手書き入力デバイス
2024.2
Fruits Maturity Classification for Harvesting Robot ICAROB2024
Reno Muhammad Fadilla, Tokuo Tsuji, Tatsuhiro Hiramitsu, Hiroaki Seki, Kaihei Okada
2024.3
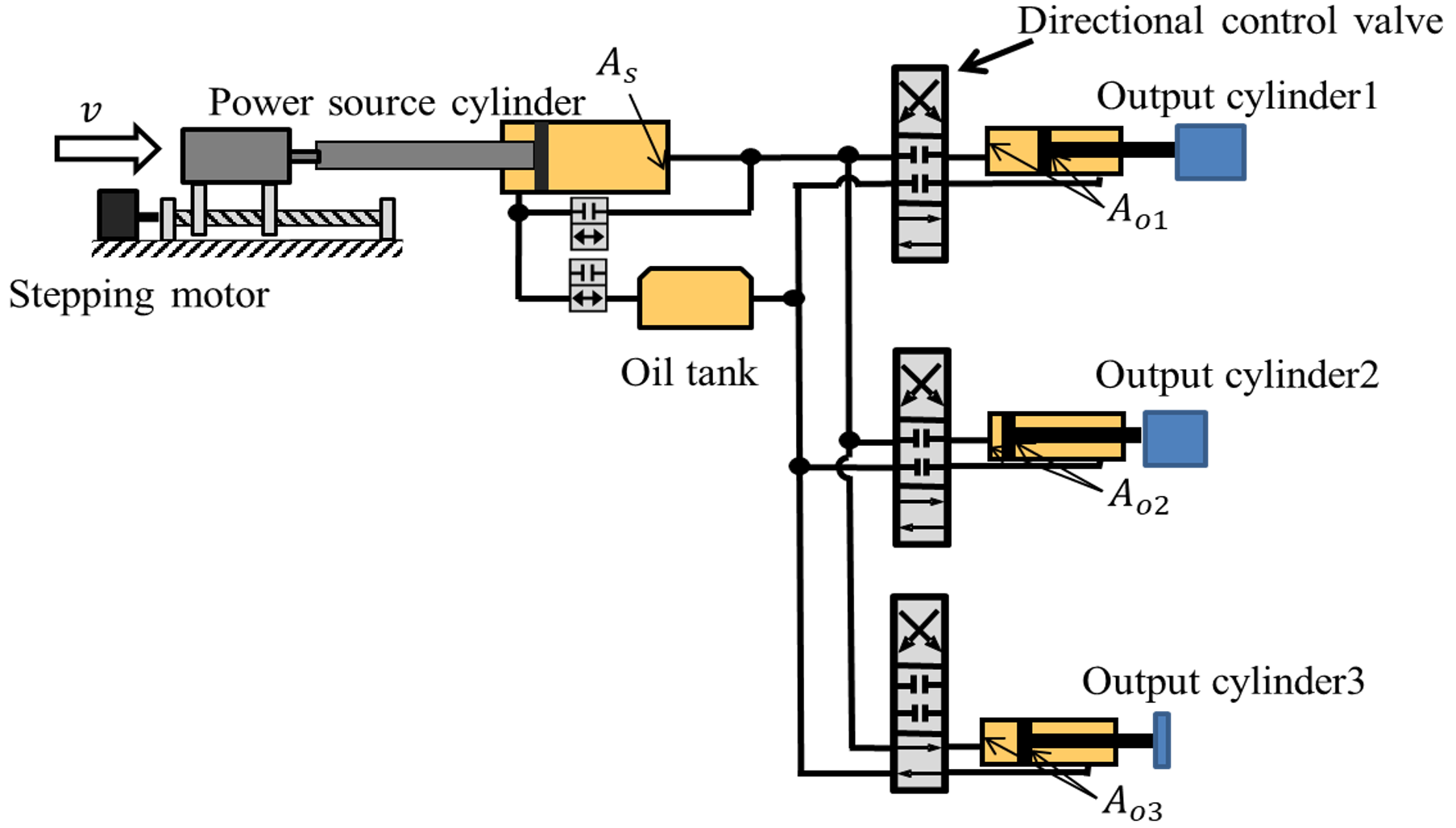
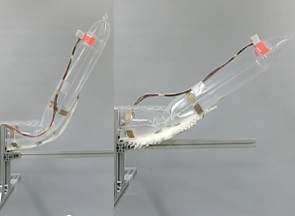
Drive Characteristics of Air-Cylinder-Type Artificial Muscle in Annular Bending International Journal of Automation Technology
Tatsuhiro Hiramitsu , Yuuki Miyake, Hiroaki Seki, Tokuo Tsuji
フォークリフトの荷物周囲モニタリングアームーアーム展開・収納の自動化ー 2024年度精密工学会春季大会
魚住奏太, 関 啓明, 辻 徳生, 平光 立拓, 遠藤武士(小松製作所), 鈴木周志(小松製作所), 横内禎生(小松製作所), 渡邉馨(小松製作所)
計量のできる食品トッピング用ロボットハンド 2024年度精密工学会春季大会
小泉瑛, 関 啓明, 辻 徳生, 平光 立拓, 沖山丈嗣(ソディック)
2024.5
紐巻き付け式ハンドにおけるRRT*アルゴリズムを用いた紐の経路推定 ロボティクス・メカトロニクス講演会2024
吉野歌織, 平光立拓, 関啓明, 辻徳生
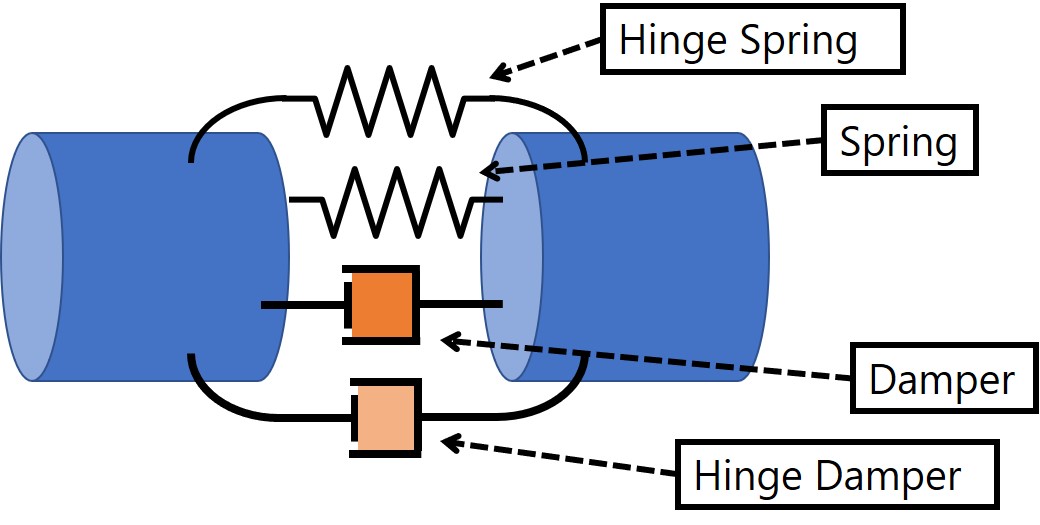
非弾性紐で拘束される関節の可動域の計算と評価 ロボティクス・メカトロニクス講演会2024
岩澤尚, 平光立拓, 関啓明, 辻徳生
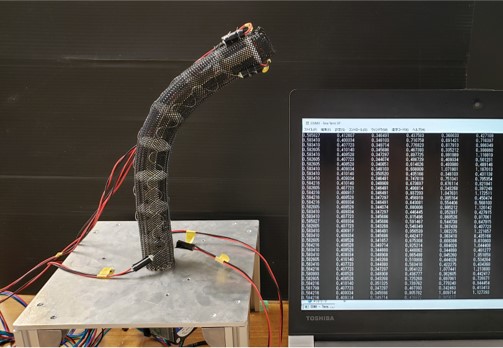
螺旋状のエアシリンダ型人工筋肉の出力特性 ロボティクス・メカトロニクス講演会2024
水谷冠太, 平光立拓, 関啓明, 辻徳生
Predicting Human Movements for Life Support Robots using Spatio-Temporal Transformer ICRA2024
Kaihei Okada, Tokuo Tsuji, Tatsuhiro Hiramitsu, Hiroaki Seki, Toshihiro Nishimura, Yosuke Suzuki, Tetsuyou Watanabe
2024.7
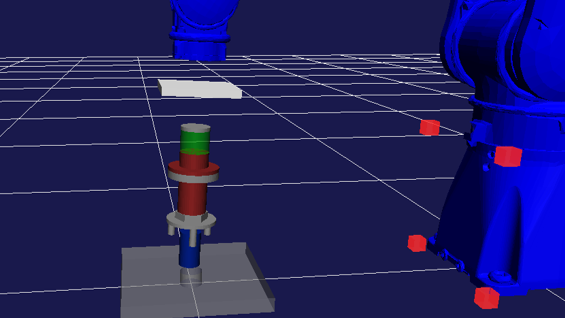
Fast and precise approximation of Minkowski sum of two rotational ellipsoids with a superellipsoid CGI2024
Ryunosuke Yamada, Tokuo Tsuji, Tatsuhiro Hiramitsu, Hiroaki Seki, Toshihiro Nishimura, Yosuke Suzuki, Tetsuyou Watanabe
2024.8
Tableware Recognition for Tidying-up Robot System 2024 IEEE International Conference on Mechatronics and Automation (ICMA)
Zhanxiang Fu, H Seki, T Tsuji, T Hiramitsu
2024.9
コンベア上の食品トッピングのための高速ロボットアーム−設計と試作− 2024年度精密工学会秋季大会
阿部晃大, 関 啓明, 辻 徳生, 平光 立拓, 沖山丈嗣(ソディック)
衝突判定高速化のための超楕円による二つの楕円のMinkowski 和の理論的な近似計算法 第42回 日本ロボット学会学術講演会
山田 龍之介, 辻 徳生, 平光 立拓, 関 啓明, 西村 斉寛, 鈴木 陽介, 渡辺 哲陽
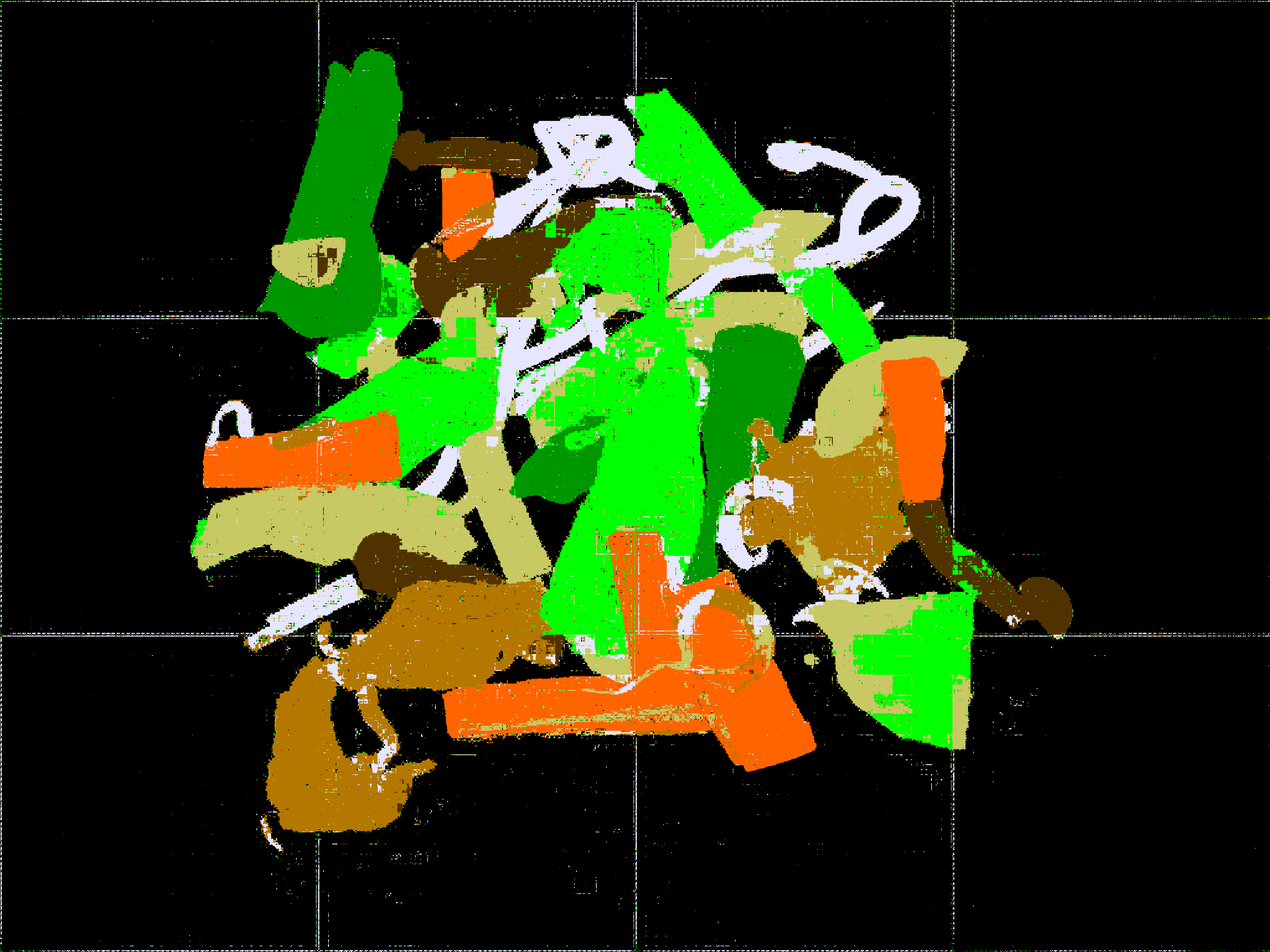
ばら積み食材の個体認識のための三次元合成画像生成 第42回 日本ロボット学会学術講演会
大津 友也, 辻 徳生, 関 啓明, 平光 立拓
2024.10
静電気を用いた箔のハンドリングに関する研究 精密工学会誌
吉田大輝, 関啓明, 辻徳生, 平光立拓
Trajectory generation for adhesive dispensing robots by modeling of material behavior Precision Engineering
Takayuki Yamabe, Kazuki Takagi(DENSO), Ryunosuke Yamada, Tokuo Tsuji, Shota Ishikawa(DENSO), Tomoaki Ozaki(DENSO), Tatsuhiro Hiramitsu, Hiroaki Seki
Pneumatic robot arm for assisting in power line maintenance ICPE2024
Kouga Narita, Hiroaki Seki, Tokuo Tsuji, Tatsuhiro Hiramitsu, Takehiro Nagata, Kazushige Matsumoto and Taiki Imada ICPE2024
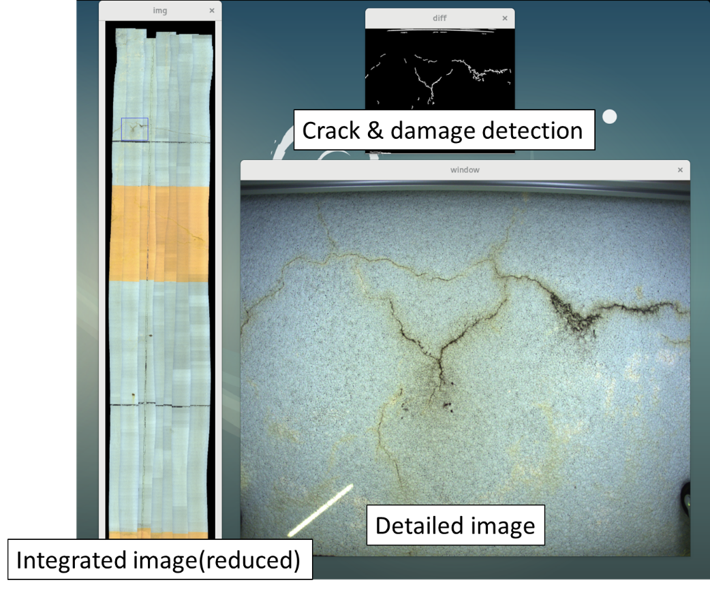
High-speed coating inspection robot for suspended box-shaped objects ICPE2024
Shota Iwasaki, Hiroaki Seki, Tokuo Tsuji and Tatsuhiro Hiramitsu
Center of gravity detection of crane load using lifting force and depth image ICMT2024
Yuma Nishida, Hiroaki Seki
2024.11
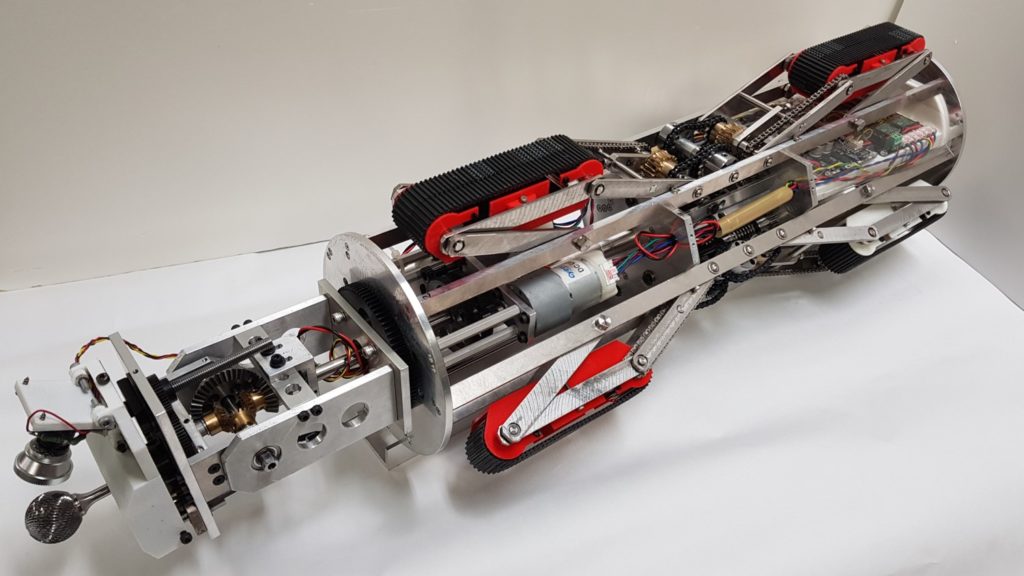
安定に段差や階段を昇降できる運搬ロボット ーロボットの試作ー 2024年度 精密工学会 北陸信越支部講演会
尾関純一, 関啓明, 辻徳生, 平光立拓
2024.12
ワンウェイクラッチによる負荷感応型減速機構を用いたロボットハンドの開発 SI2024
西村 岳大, 辻 徳生, 平光 立拓, 関 啓明, 西村 斉寛, 鈴木 陽介, 渡辺 哲陽
2025.1
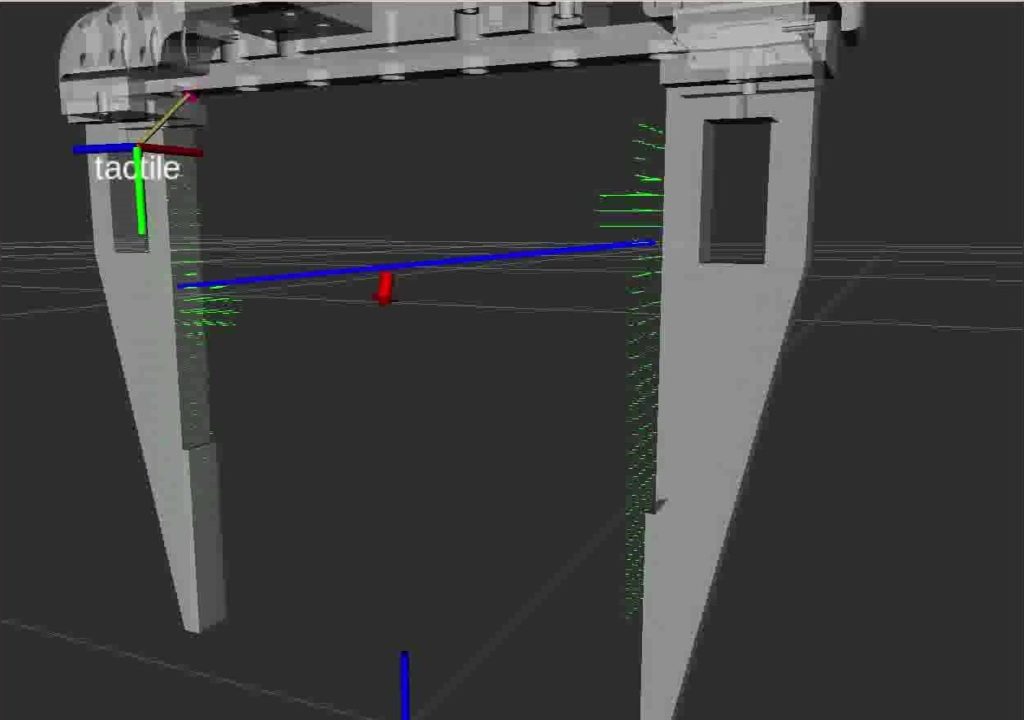
Tight Clearance Peg-in-Hole Motion Planner Using Gripper with Flexible Joint and Differential Infinity Rotatable Function of Palm SII2025
Masanori Ueda, Tokuo Tsuji, Tatsuhiro Hiramitsu, Hiroaki Seki,Toshihiro Nishimura, Yosuke Suzuki, Tetsuyou Watanabe
Versatile Robotic System for Assembly Tasks Using Flexible Mechanism SII2025
Masanori Ueda, Ryunosuke Yamada, Tokuo Tsuji, Kaihei Okada, Takehiro Nishimura, Ryota Shimizu, Yuya Otsu, Kaori Yoshino, Yosuke Suzuki, Toshihiro Nishimura, Tetsuyou Watanabe
2025.2
Individual recognition of food in bulk by using 3D model of food ICAROB
Yuya Otsu, Tokuo Tsuji, Tatsuhiro Hiramitsu, Hiroaki Seki
Motion Prediction for Human-Robot Collaborative Tasks Using LSTM ICAROB
Real-time cable tracking by wire segmentation and Coherent Point Drift ICAROB
Ryunosuke Yamada, Tokuo Tsuji, Takahiro Shimizu, Shota Ishikawa(DENSO), Tomoaki Ozaki(DENSO),Yusuke Sakamoto, Tatsuhiro Hiramitsu, Hiroaki Seki
2025.3
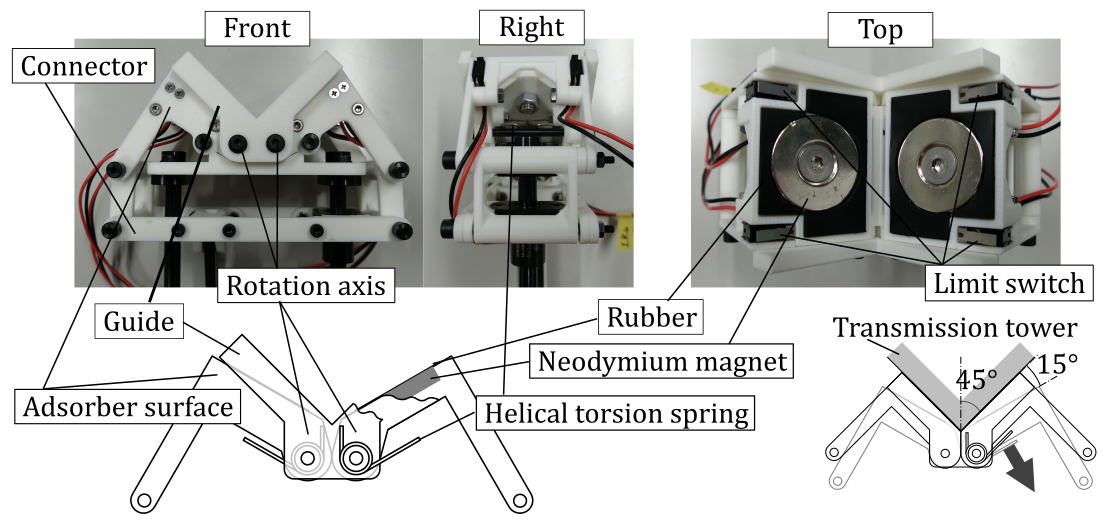
組み立て作業のための磁石を用いた可変剛性関節 2025年度精密工学会春季大会
何邁克, 辻徳生, 上田雅典, 平光立拓, 関啓明
安定に段差や階段を昇降できる運搬ロボット ー昇降機能の実現ー 2025年度精密工学会春季大会
紐で可動域をデザインする紐関節の開発 2025年度精密工学会春季大会
岩澤尚登, 平光立拓,関啓明, 辻徳生