Robot Motion Teaching Based on Human Motion Using Machine Learning
Overview
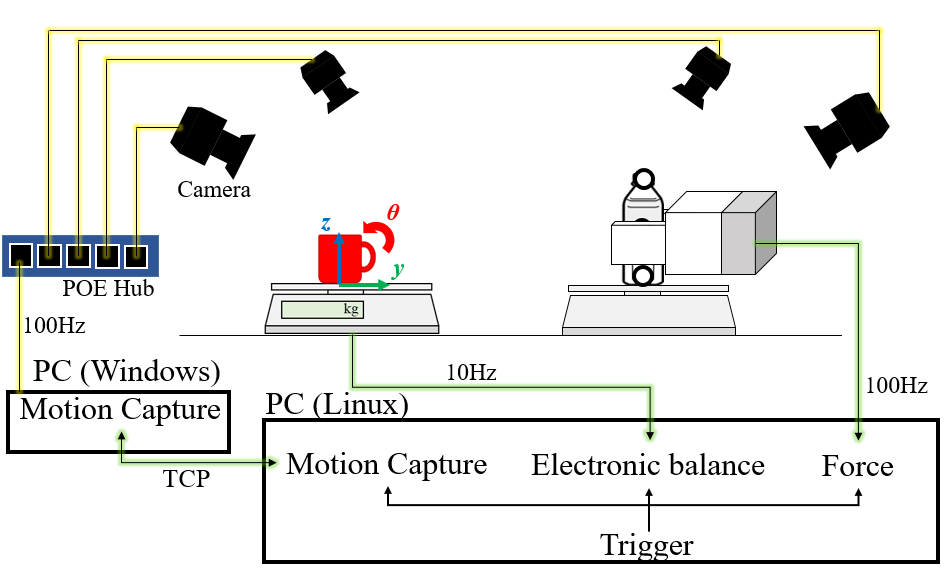
Currently, an attempt is being made to realize assembly work with robots. In order to generate robot motions, it is necessary to switch motions depending on the current state, but there has not been enough research on a general model that can generate motions from force sensors. In this study, we derive the position and posture of the robot by learning the manipulation force obtained from the motion capture and the force sensor in advance, and generate the motion without trial by estimating the work completion flag from the force sensor value.