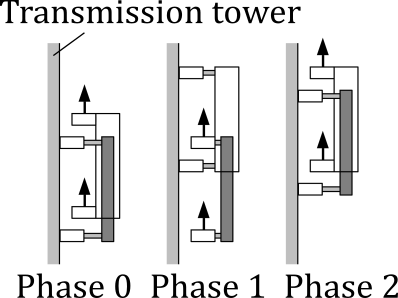
In japan, there is many superannuated transmission towers. On the other hand, it is deepening seriousness of the manpower shortage for inspect and repair them. To maintain the living standards of the people, it is required to increase operating efficiently. For efficient maintenance of transmission towers, we are developing a robot which works in place labor. In this research, we developed climbing robot which able to get over steps automatically.
Study approach
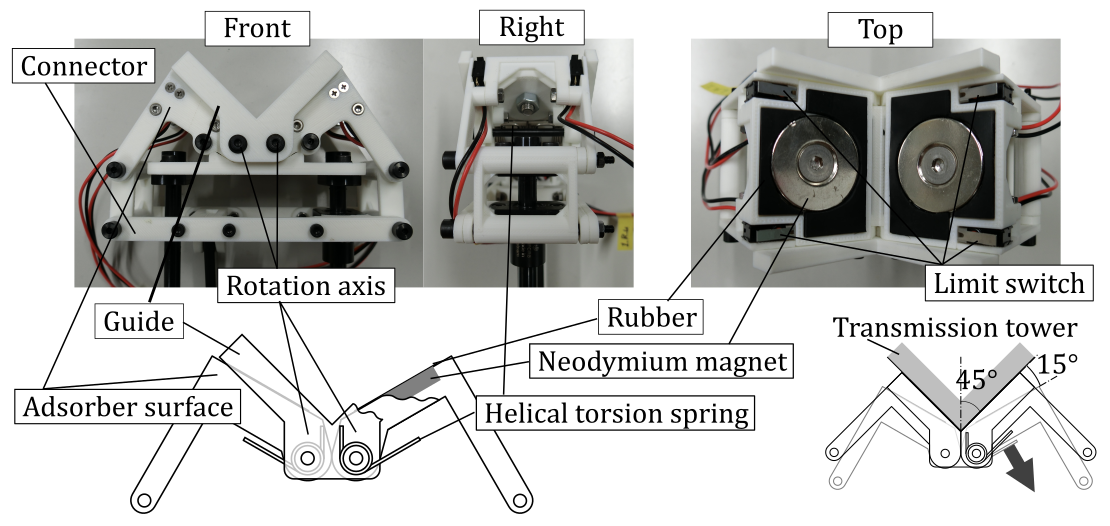
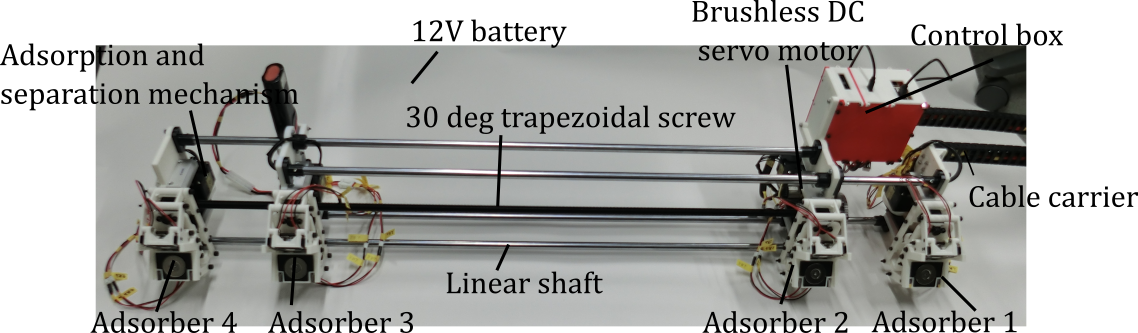
Developed climbing robot is four-footed robot. These foot are replaced by adsorbers which uses neodymium magnets and is designed to adsorb transmission tower smoothly. Using four limit switches, it is detectable adsorption condition.