Compact in-pipe robot with multi-DOF cutting tool
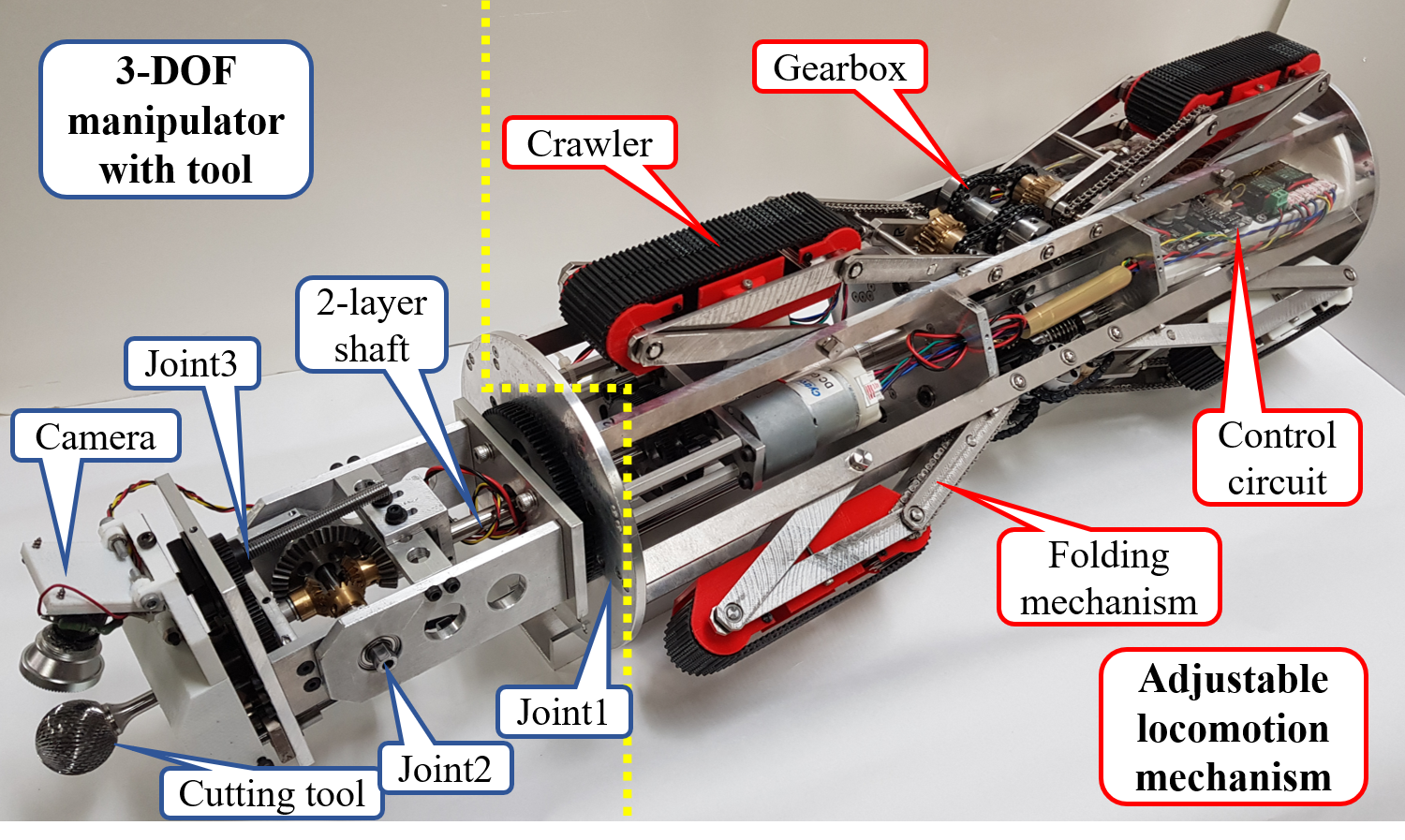
Abstract: This research is about development of the in-pipe robot for heavy duties such as repairing and maintenance tasks, by focusing on the sewers between households or businesses to the main sewers. The robot is expected to work instead of workers to help them work easier and safer, such as in small pipe that the workers cannot access, or dirty and dangerous environment that can affect to the health and life of the workers. The most conventional robots in the past were mainly designed for survey and inspection. While some robots focus on maintenance task, but their robots are not available for small pipe and their manipulator have a few DOF. Then, we propose a compact in-pipe robot with multi-DOF cutting tool (CIPbot-1) for the target pipes between 150-300mm in diameter to enhance the ability of these kind of robot. The difficulties of development this robot is the space limitation caused by the smallest target pipe which affects to the mechanism design, and the rigidity of robot’s structure and the expandable mechanisms that must adjust the diameter of the robot about 2 times to fit with the smallest and the biggest target pipes. The proposed robot mainly consists of a locomotion section (adjustable folding mechanism and six-crawlers, each of them is driven by only one motor) and a manipulator section (3-DOF manipulator with a cutting tool and a camera system for inspection). The prototype of CIPbot-1 was made and confirmed the mobility, the ability, and the usefulness by the experimentations.