Development of Wire-suspended robot for Wall Inspection
Overview
In a traditional assessment of structure of walls, workers perform close up visual survey, hammering test, and touch inspection.
For such inspections, workers use temporary scaffolding, aerial work platforms, and rope access, however this method is time-consuming and it involves the risk of falling.
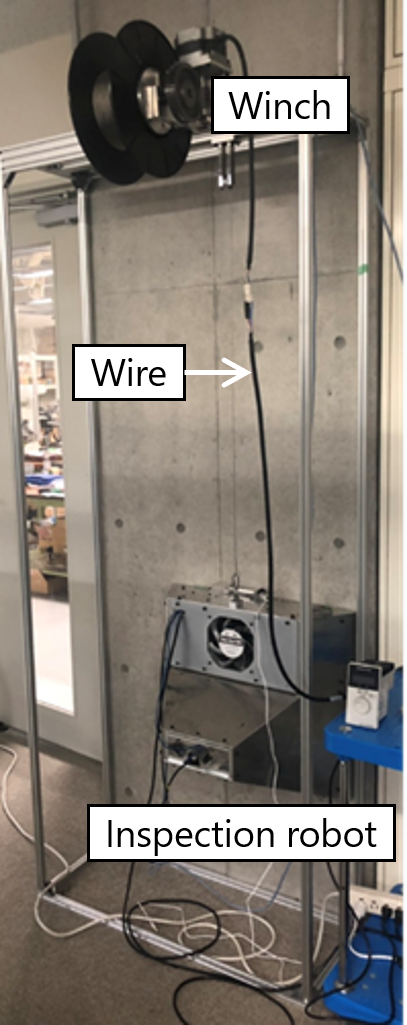
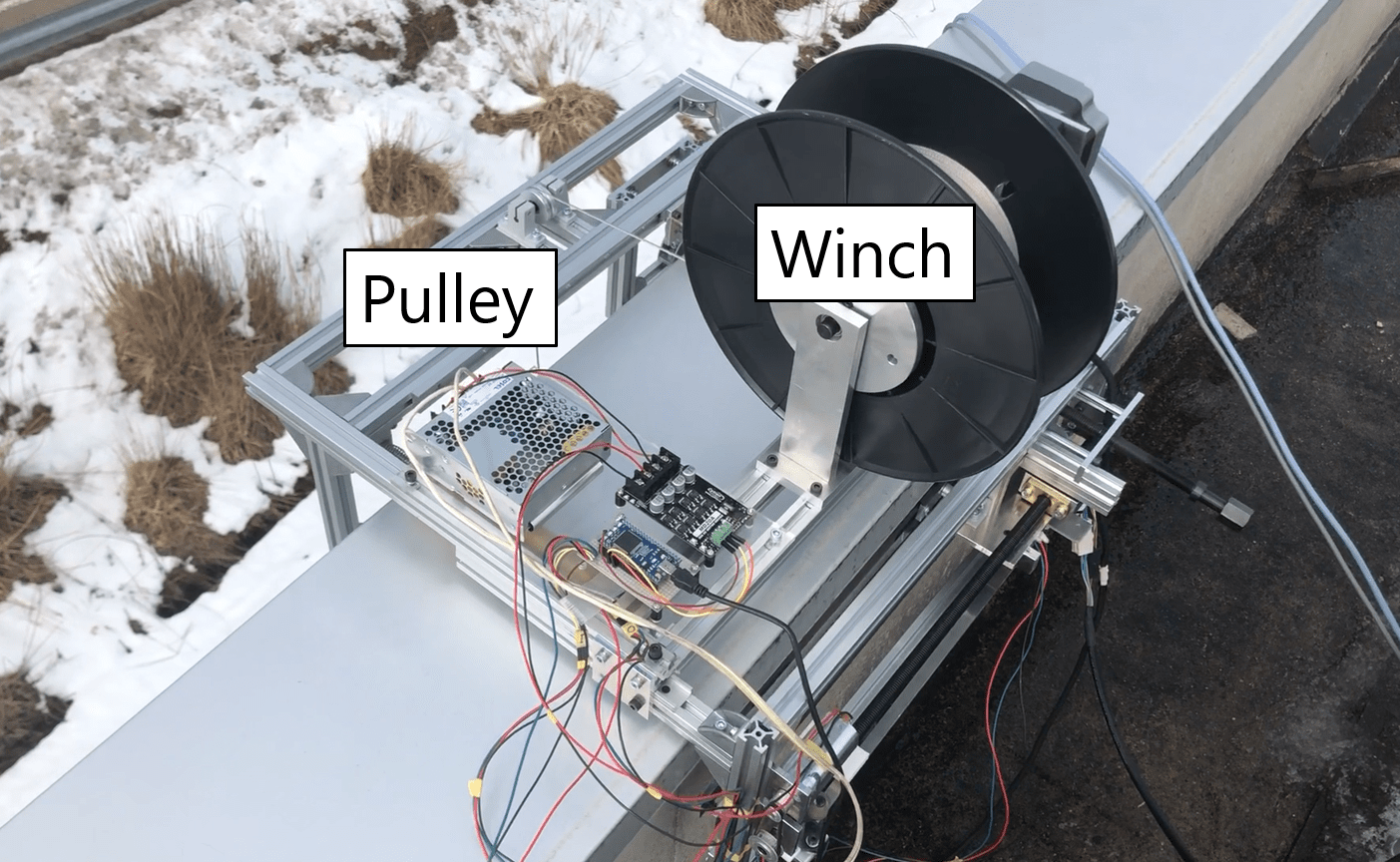
Here, we propose a wire-suspended robot for a safe and costefficient wall inspection. This robot is equipped with a camera and a hammering mechanism, and performs image diagnosis of the wall surface and hammering test, which are the conventional inspection methods performed by workers. Works
Kan, T., Kunio, U., Hiroaki, S., Tokuo, T.,Tatsuhiro, H., Yoshihiko, H., and Kiyoji, K., “Study on Lateral Movement Mechanism of Wire-suspended Robot for Wall Inspection”, Proceedings of 18th International Conference on Precision Engineering, C-3-5, 2020/11/20, Online, Oral