Robotics and Mechatronics Laboratory
Kanazawa University
Automatic cutting machine for gold leaves
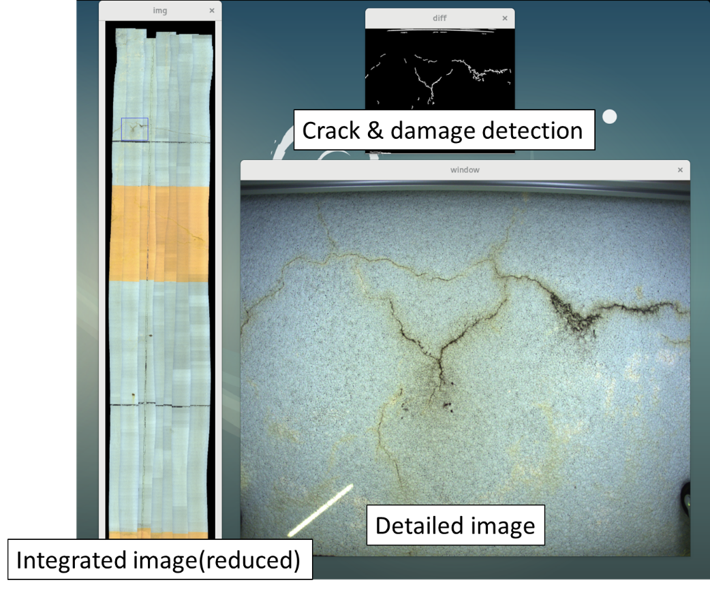
Crane monitoring system using pan-tilt stereo camera
Navigation of a mobile robot using retro-reflective markers
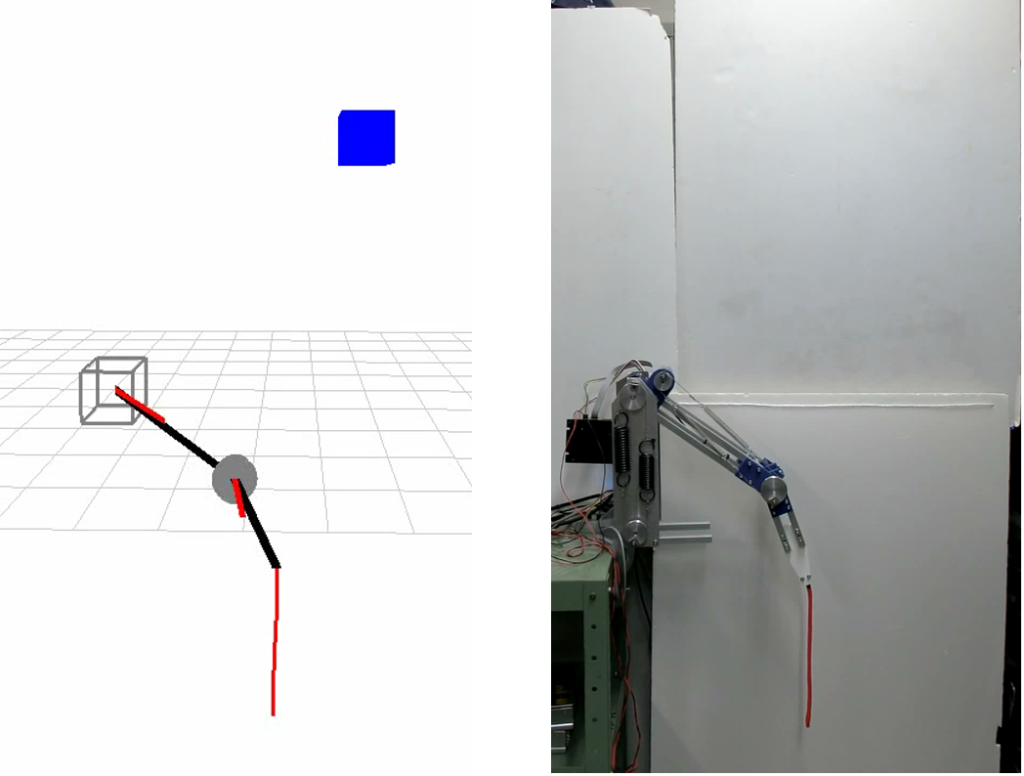
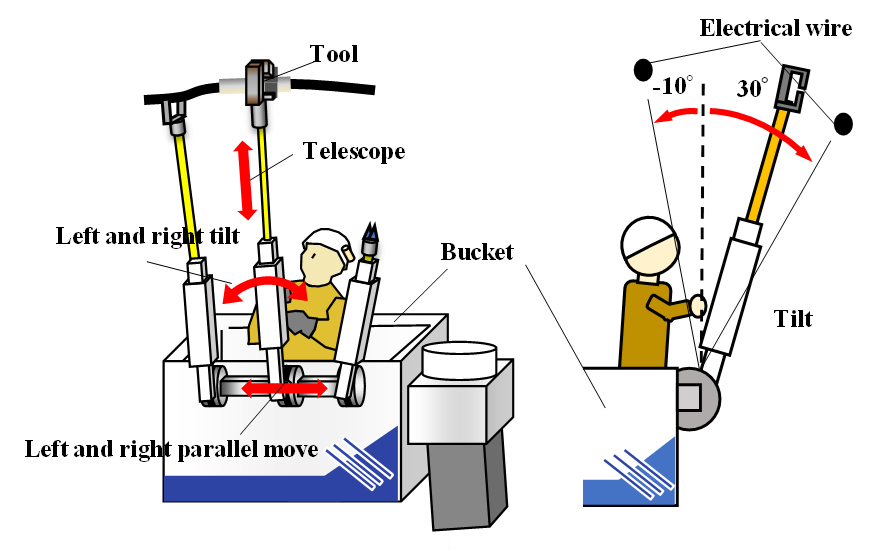
Assitive robotic arm for power line maintenance
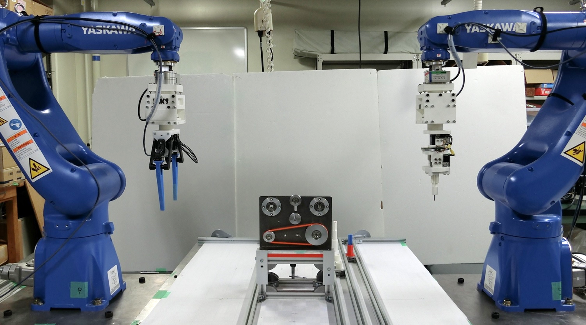
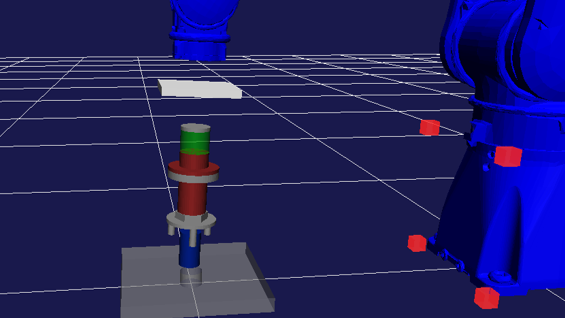
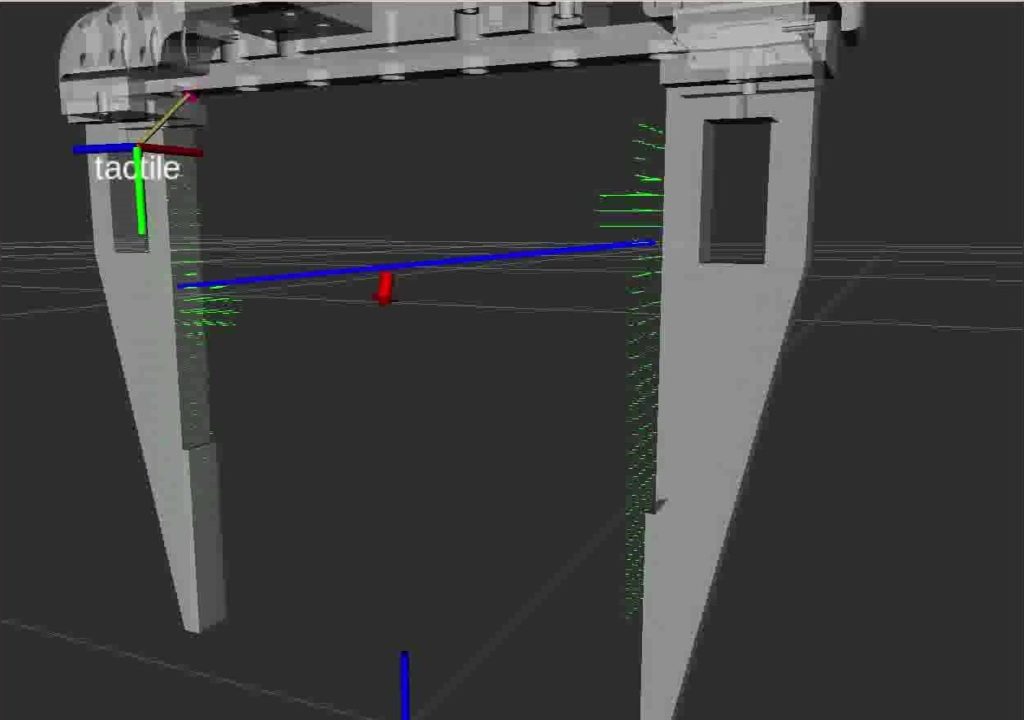
Spreading task of a towel by robot arms
Folding task of clothes by robot arms with some tools
Wearable handwriting input device