Robotics and Mechatronics Laboratory
Kanazawa University
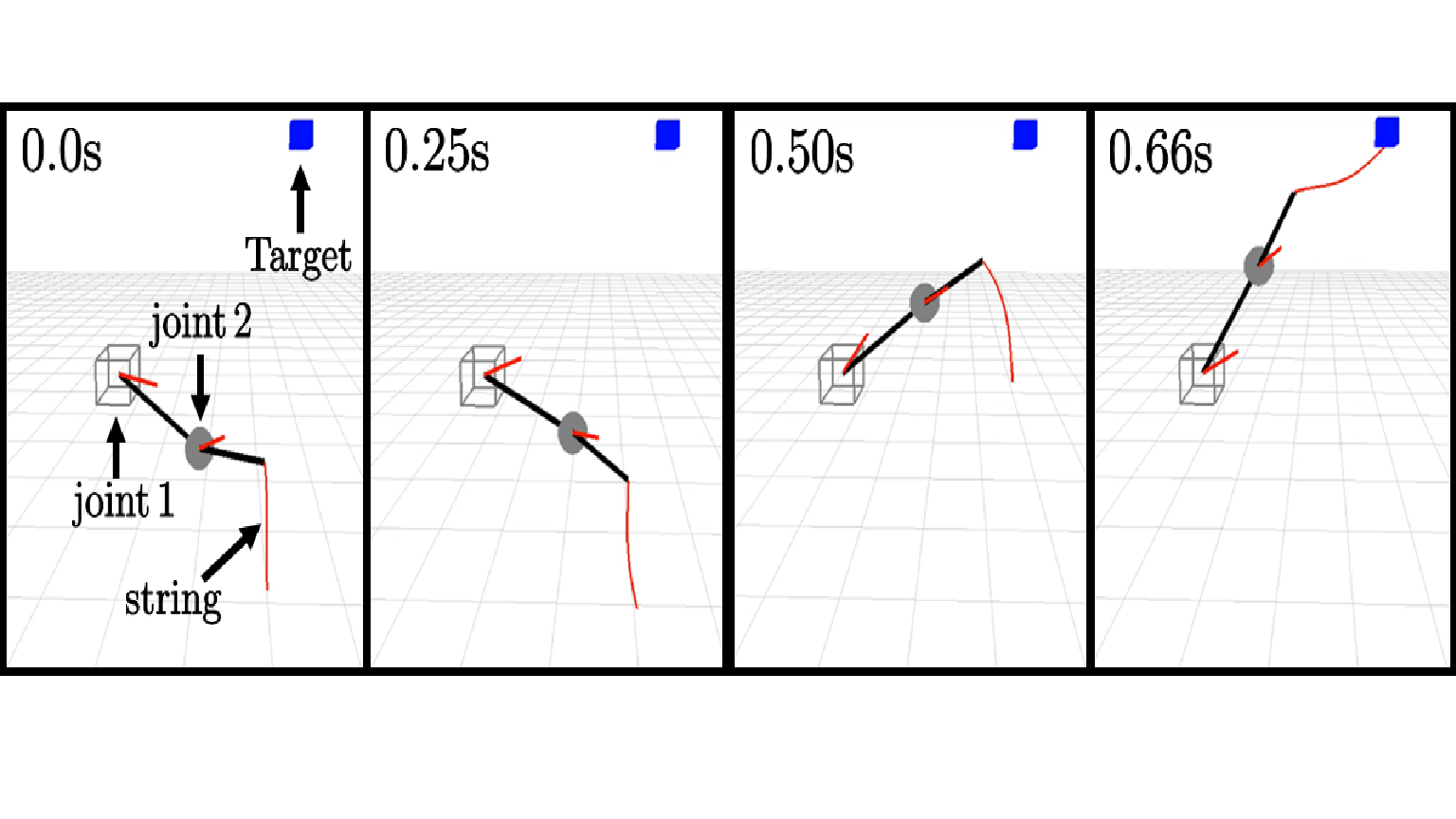
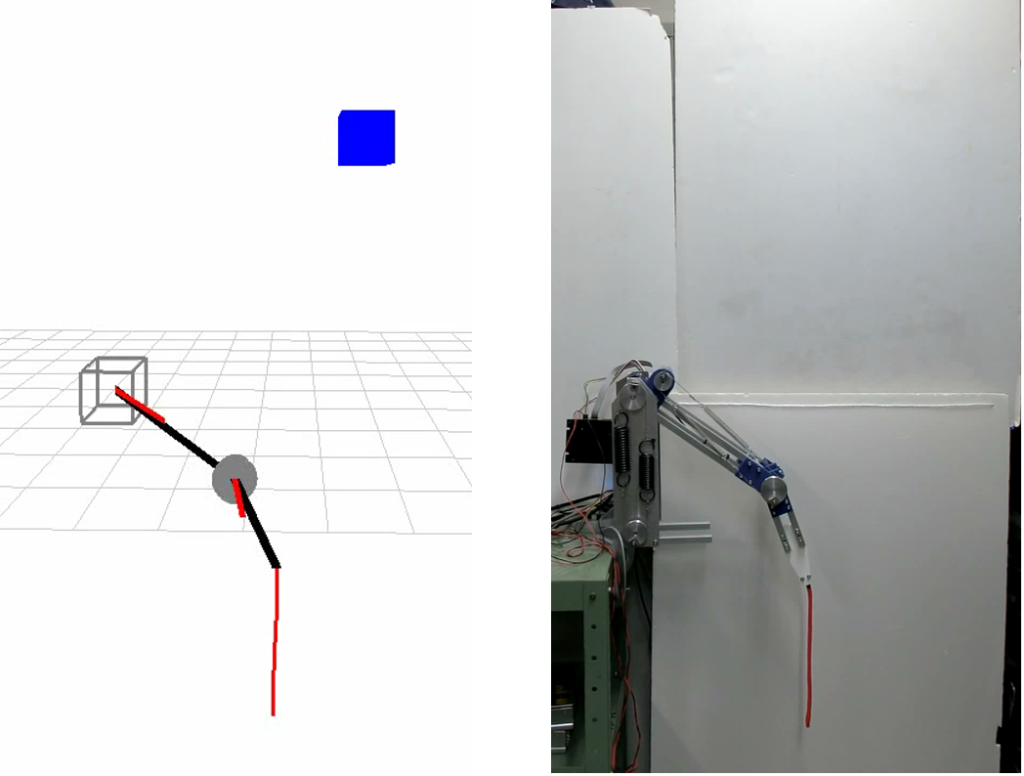
We study a string dynamic manipulation using flexible joint robot arm inserted springs in joints. We explore how springs in joints can affect the rope manipulation, and suggest high-speed rope manipulation by low power motor.