Precise assembly work with stiffness switching joint
Overview
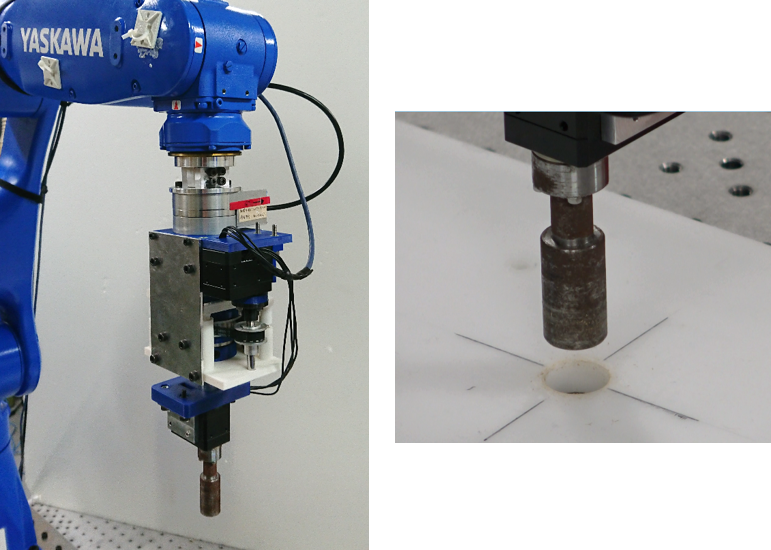
It is not easy to automate precision fitting in assembly work, and even today, many assembly operations still rely on human labor. In this study, we aim to construct a low-cost and flexible assembly system by using flexible and rigid switchable joints for the wrist part of an industrial robot, and to realize precise assembly work.
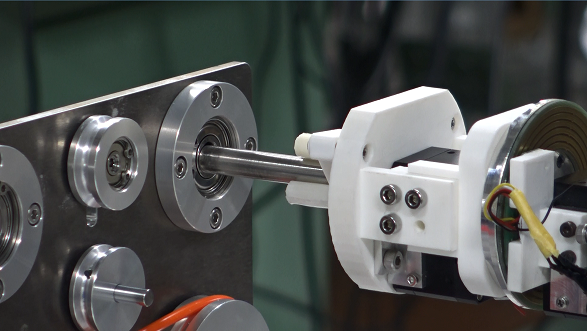
Fig.1 Assembly work
Study
We performed peg-in-hole task using the developed joint and confirmed its effectiveness.