Robotics and Mechatronics Laboratory
Kanazawa University
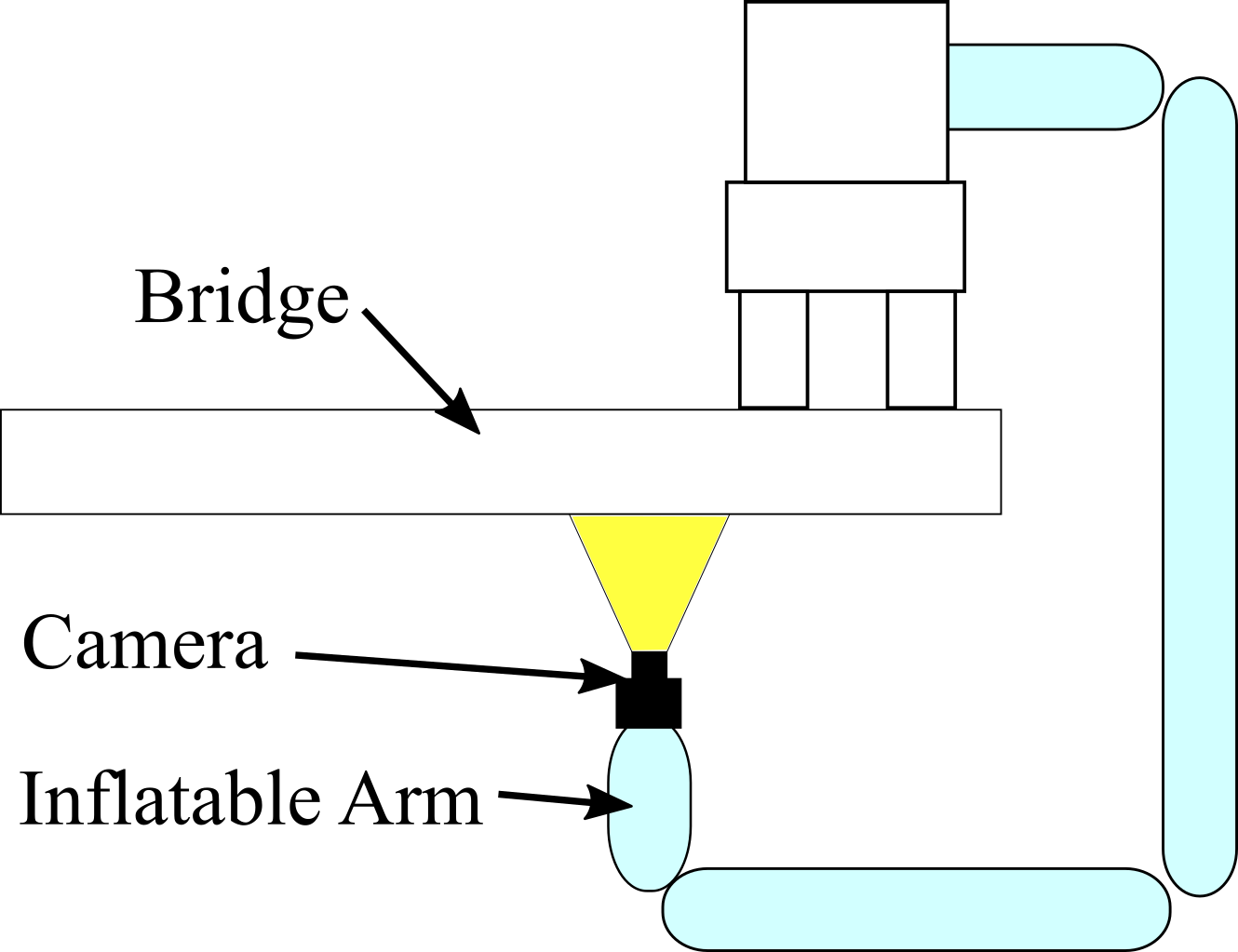
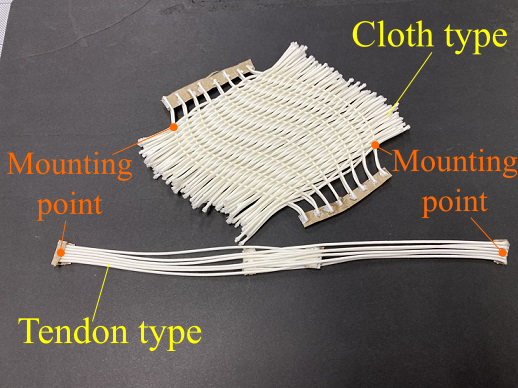
To realize an arm-type bridge inspection system with an inflatable structure, a flexible and lightweight vibration suppression mechanism is required at the joints. We proposed tendon-type and cloth-type vibration control mechanisms using strings.
Nomal type
Tendon type
Cloth type