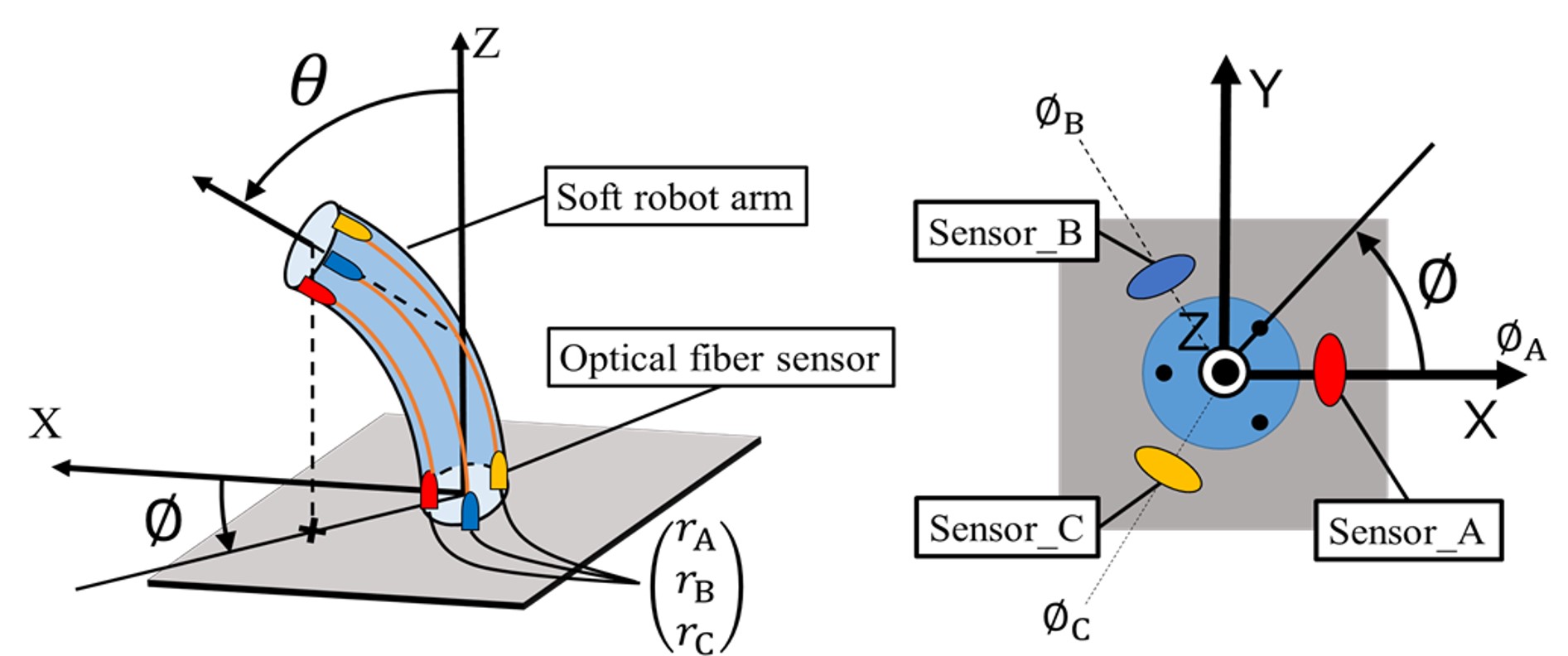
We proposed a method of estimating the bending angle and the bending direction by arranging three optical fibers on a soft robot arm and measuring the amount of light attenuation by bending each optical fiber.
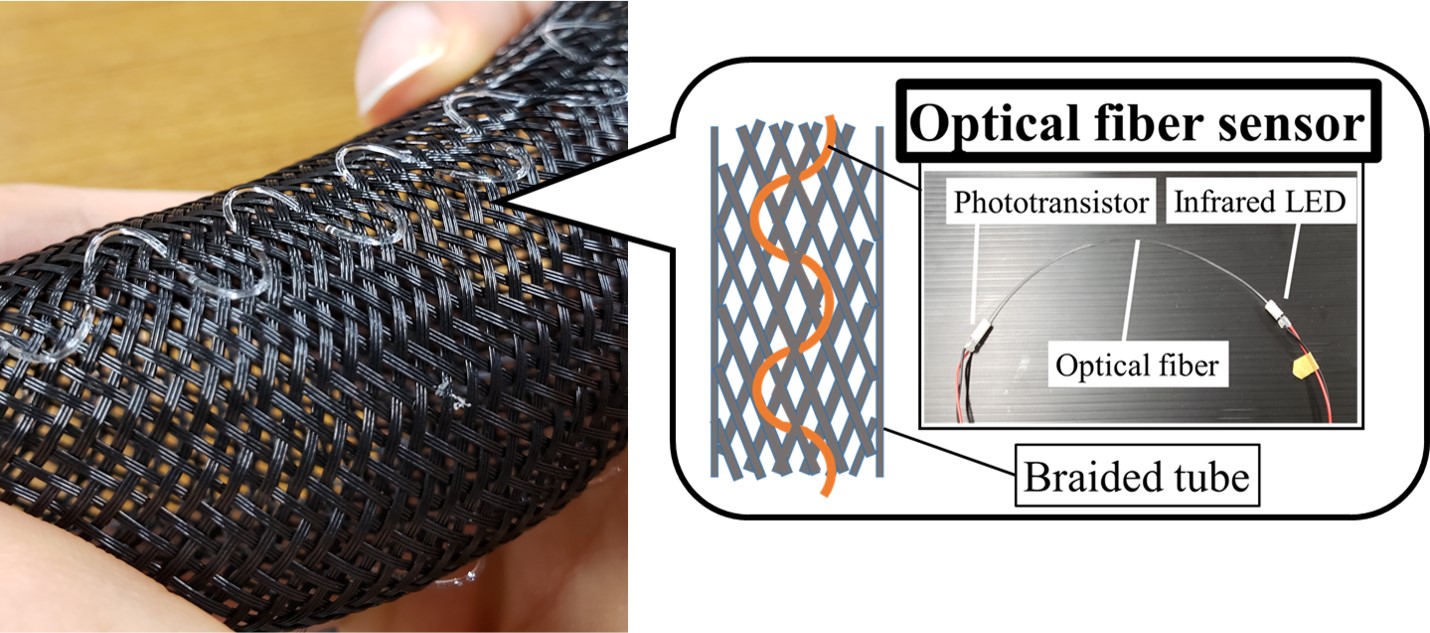
Optical fiber seonsor
Outline of posture estimation method
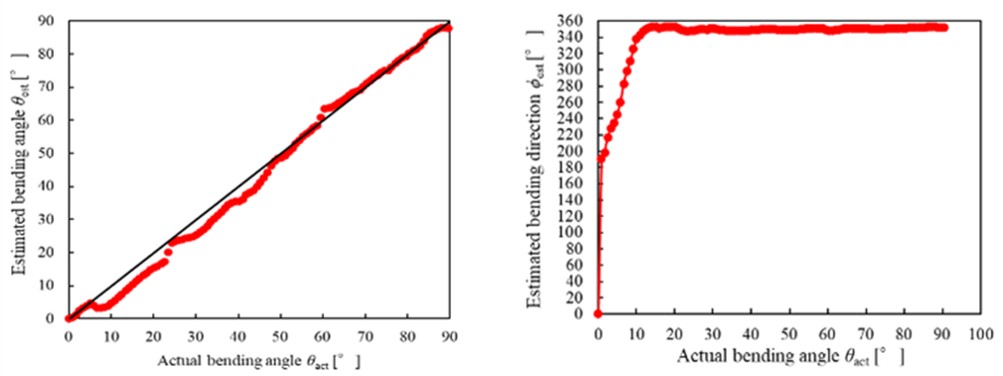
Results of posture estimation in bending direction ϕ = 0°