Rotary Joint Composed of RotationalThings and Skeletal Structure
Overview
In recent years, there has been a lot of research on making the links, actuators, and joints of robots more flexible. Among them, the research on constructing soft joints by using elastic deformation of materials has attracted much attention. This has the advantage of reducing the number of parts and weight.
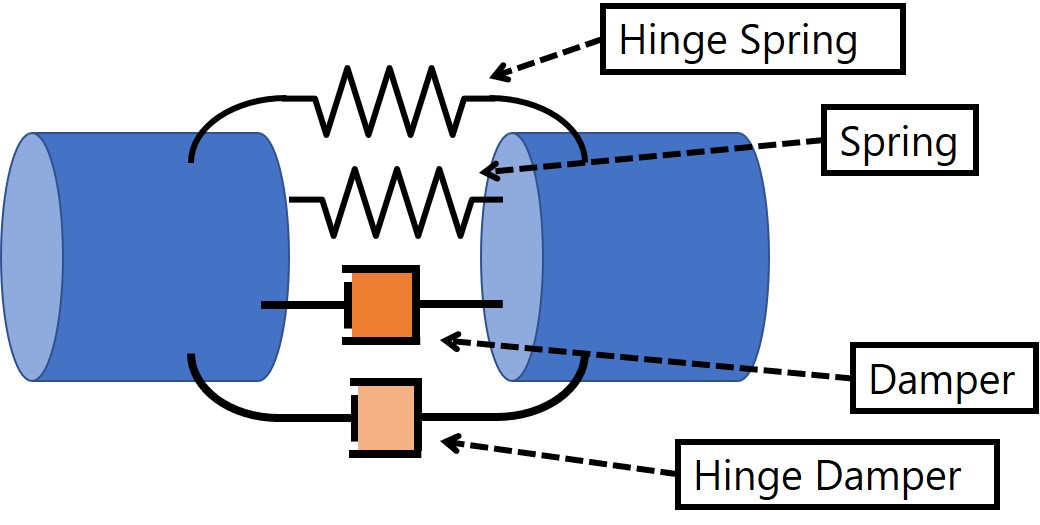
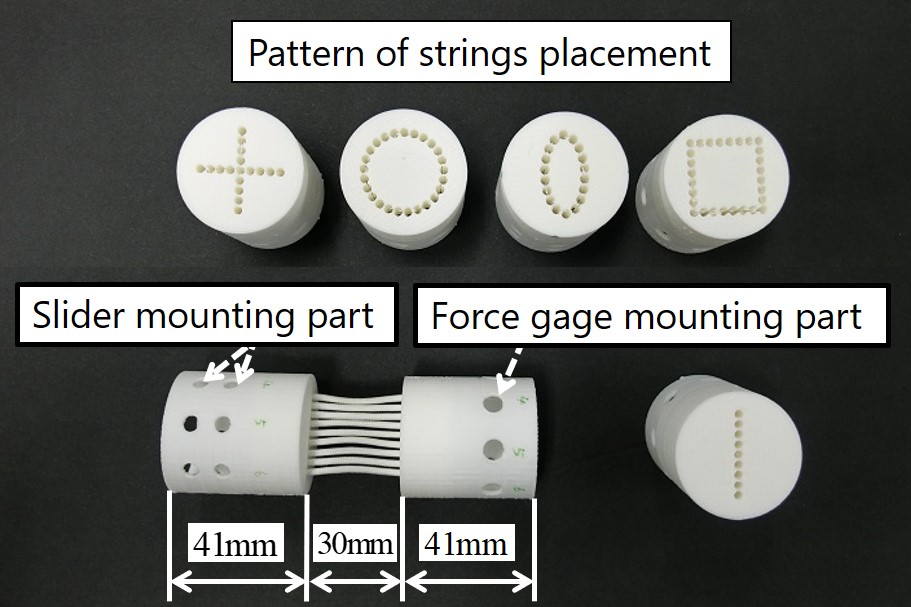
In this study, we focus on a flexible material, string, and propose a joint structure that consists of strings between links. The joint structure can be anisotropic depending on the way the strings are arranged. In addition, the joint can be anisotropic depending on the way the strings are arranged. Thus, by using strings to create joint structures, we can expect to realize joints with different bending directions and stiffnesses in the same structure.