Manipulating deformable objects by robot arm is difficult due to the
difficulty of deformation recognition and prediction. We consider
dynamic manipulation for unknown characteristic rope and describe how to
manipulate it.
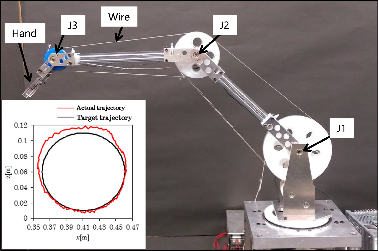
The robot manipulates the string for reaching the tip to the target position
The manipulation aimed at shaking string
The manipulation aimed at realizing momentary string shape (S shapes)