Grasping Motion Strategy for Picking Using Machine Learning
OverView
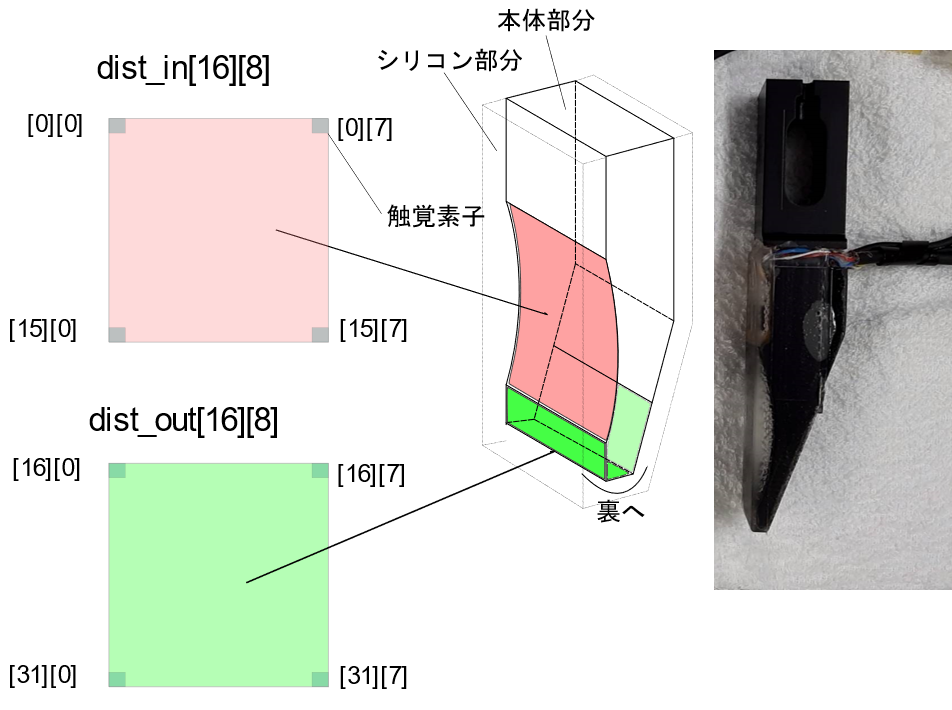
In automated factory, robot assemble the products automatically. So robot need to pick the parts quickly. I research the strategy of picking to grasp object efficiently. I make good use of tactile sensor to recognize the grasping state.